WSL-Ubuntu20.04安装ROS Noetic
1. 插入ros源
# 查看Ubuntu版本
lsb_release -a
# 国内源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/...
1. 插入ros源
# 查看Ubuntu版本 lsb_release -a # 国内源 sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list' # 添加密钥 sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654 # 更新 sudo apt-get update # 不报错就是ok了
2. 安装ros
# 根据Ubuntu版本安装对应的ros # 20.04为noetic,16.04为Kinetic,18.04为Melodic sudo apt-get install ros-noetic-desktop-full
3. 设置环境变量
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc source ~/.bashrc # ROS节点权限问题,运行某些节点需要管理员权限(涉及硬件),则也要在root用户中设置环境变量 sudo su echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc source ~/.bashrc
4. 构建包依赖
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
5. 初始化
我这里初始化失败了,但是并没有影响后续的ros使用,所以就不写初始化了,有兴趣可以看看连接
https://blog.csdn.net/qq_32705211/article/details/106183278 https://blog.csdn.net/qq_41746268/article/details/84726596
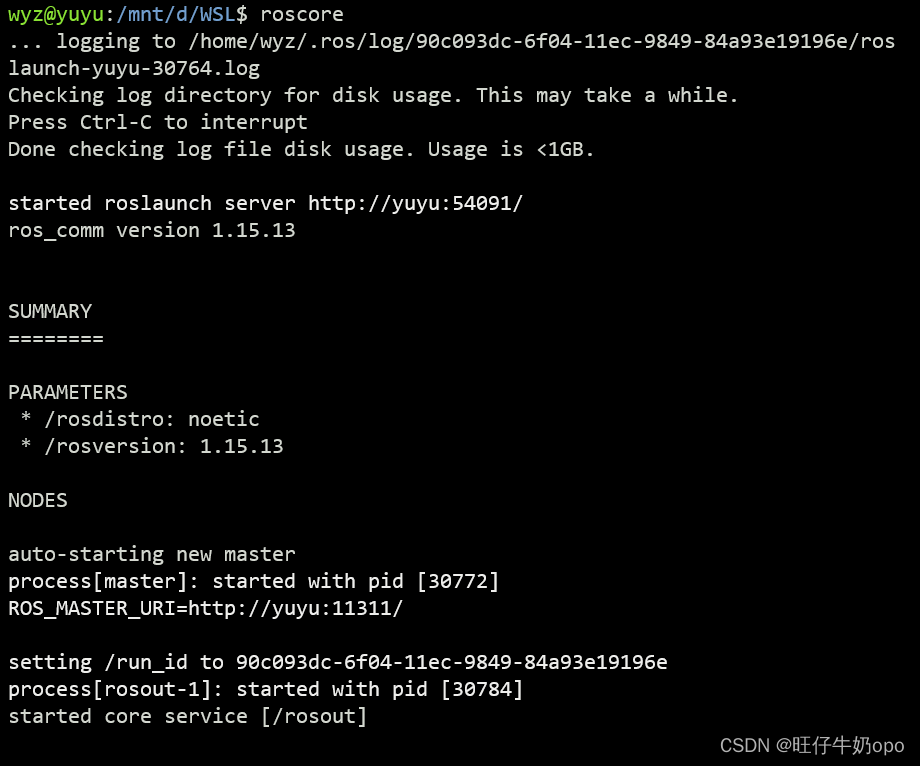
6. 启动ros
roscore
出现如下信息则启动正确
- 发表于 2022-07-21 21:52
- 阅读 ( 1656 )
- 分类:ROS及基础开发
